Sloshing je prudké rezonanční volné povrchové proudění v nádobě. Hlavním cílem této diplomové práce bylo studium sloshingu v pravoúhlých a hranolových nádržích. Tank může být buzen harmonickým pohybem nebo se může pohybovat s lodí ve vlnách. V druhém případě se vyšetřuje problém spojených s pohybem lodi a sloshingem. Ve výpočtech sloshingu se používá nelineární analyticky založený model sloshingu. Byly provedeny experimenty a shromážděná data jsou využívána při ověřování modelu sloshingu a výpočtech interakce mezi sloshingem a dynamikou lodi. Jsou studovány dopady na střechu nádrže. Energie v nárazovém paprsku se rozptýlí a to vede k tlumení slashového pohybu. Pro začlenění vlivu disipace energie do výpočtů se používá iterativní postup. Tlumení slashujícího pohybu je důležitým parametrem kolem rezonance pro spojený pohyb lodi a slashing systém.
Model sloshingu je založen na nelineární teoretické analýze dvourozměrného nelineárního proudění nestlačitelné tekutiny s irotačním prouděním v obdélníkové nádrži. Předpokládá se nekonečná výška střechy nádrže a žádné přelaďovací vlny. Volný povrch je vyjádřen jako Fourierova řada a rychlostní potenciál je rozšířen v podmínkách lineárních přirozených režimů pohybu tekutiny. Nekonečněrozměrný modální systém je aproximován a výsledkem je konečný soubor obyčejných diferenciálních rovnic v čase pro zobecněné souřadnice (Fourierovy koeficienty) volného povrchu. Tato teorie neplatí pro malou hloubku vody nebo když voda silně dopadá na střechu nádrže. Navrhovaná metoda má vysokou výpočetní účinnost, usnadňuje simulace spojeného systému vozidlo-kapalina a byla rozsáhle ověřena pro vynucené pohyby.
Byly provedeny experimenty s hladkou obdélníkovou nádrží vycházející z nucených harmonických horizontálních oscilací a výsledky jsou použity k ověření analytického modelu sloshingu. Přechodové jevy as nimi spojená nelineární modulace vln, tepání, jsou důležité kvůli nízké úrovni tlumení pohybu tekutiny. Měřenými parametry jsou pohyb nádrže a výška volné hladiny ve třech polohách. Obrázky a video se používají ke studiu detailů místního proudění a dynamiky proudění. Při excitačních periodách v blízkosti první přirozené periody pohybu tekutiny v nádrži vedou i malé amplitudy pohybu k prudkému slanění a nárazům mezi stoupající vodní hladinou a střechou nádrže.
Nárazy způsobují vysoké tlaky a síly. Účinek bouchnutí v nádrži je zahrnut lokální analýzou interagující s nelineárním modelem sloshingu. Metoda založená na Wagnerovi se používá k nalezení toku vyvolaného bouchnutím. Hydroelastické účinky jsou ignorovány. Hypotéza, že kinetická a potenciální energie v proudícím proudu vyvolaném nárazem se rozptýlí, když proudový proud dopadne na volnou hladinu, umožňuje racionální výpočet tlumícího účinku nárazů na sesuvný proud. Wagnerův přístup vyžaduje malý úhel mezi dopadovou volnou hladinou a střechou nádrže. Pokud tomu tak není, použije se korekce řešením podobnosti nebo alternativně zobecněním Wagnerovy teorie platné pro větší úhly. Vzhledem k tomu, že se používají analyticky založené metody, jsou předpovědi zatížení nárazem tekutiny robustní.
Experimentálně i teoreticky je studován spřažený lodní pohyb a sloshing systém. Byly provedeny dvourozměrné experimenty na části lodi ve tvaru krabice vybuzené mořem s pravidelným paprskem. Sekce obsahuje dva tanky a může se pohybovat pouze kývavě. Pohyb tekutiny uvnitř nádrží má velký vliv na odezvu kývavého pohybu sekce. Simulace odpovídajícího systému jsou prováděny za předpokladu převážně lineárního vnějšího proudění a aplikací nelineárního modelu sloshingu. Lineární vnější hydrodynamická zatížení způsobená pohybem těla jsou vyjádřena pomocí konvolučního integrálu představujícího historii pohybu tekutiny. je uvedena podrobná numerická studie toho, jak přesně a numericky kývat lodní částí. Vypočítaný spřažený pohyb je citlivý na tlumení smykacího pohybu v určitém frekvenčním rozsahu, kde spřažený soukaný a lodní pohyb způsobuje rezonanční pohyby lodi. K vysvětlení toho se používá kvazilineární frekvenční doménová analýza zavedením slashových zatížení jako frekvenčně závislé pružiny.

Mnoho průmyslových aplikací vyžaduje přemísťování nádob naplněných kapalinou po rovinných drahách (jmenovitě po drahách v horizontální rovině), pomocí lineárních dopravních systémů nebo sériových robotů. Pohyb kapaliny uvnitř nádoby, známý jako lejno, je obvykle nežádoucí, proto je potřeba mít pod kontrolou píky, které volný povrch kapaliny vykazuje během pohybu. Tento článek si klade za cíl ověřit model pro odhad výšky sloshingu kapaliny, který bere v úvahu 2-rozměrné pohyby válcové nádoby probíhající v horizontální rovině se zrychlením až 9.5 m/s 2 . Tento model lze využít pro účely hodnocení nebo optimalizace. Jsou popsány experimenty prováděné s robotem po třech drahách, z nichž každá má různé profily pohybu. Jsou poskytnuta a diskutována srovnání mezi experimentálními výsledky a modelovými predikcemi.
Nakonec je předchozí formulace rozšířena, aby se zohlednilo přidání vertikálního zrychlení až do 5 m/s 2 . Výsledné trojrozměrné pohyby jsou experimentálně ověřeny, aby se prokázala účinnost rozšířené techniky.
Podobný obsah si prohlížejí ostatní

Softwarová aplikace pro rychlou simulaci kapaliny

Ekvivalentní mechanický model obdélníkové nádoby připevněné ke kyvadlu ve srovnání s experimentálními daty a analytickým řešením
Článek 20. února 2020
Marcus V. G. de Morais, Alejandro A. O. Lopez, … Lineu J. Pedroso
Samohybný robotický systém s viskoelastickým kloubem: dynamika a analýza pohybu
Článek 26. února 2019
Pengcheng Liu, M. Nazmul Huda, … Li Sun
Vyvarujte se běžných chyb v rukopisu.
1 Úvod
Přeprava nádob naplněných kapalinami nachází uplatnění v několika průmyslových aplikacích, např. v potravinářských a nápojových nebo farmaceutických výrobních a balicích linkách. Obvykle je manipulace s takovými kontejnery přiřazena lineárním dopravním systémům nebo průmyslovým sériovým robotům; v mnoha případech požadovaný pohyb sleduje rovinné křivky. Predikce pohybu kapaliny uvnitř nádoby, označovaná jako lejno, je důležité, aby nedošlo k přetečení kapaliny. Navíc lze využít spolehlivý predikční model sloshing k omezení míchání kapaliny během provádění úkolu.
Za tímto účelem jsou v [2] a [3] uvedeny metodologie strojového učení, kde se počínaje sběrem dat vytvářejí prediktivní algoritmy pro kontrolu chování diskrétních částic kapaliny uvnitř válcové nádoby. Tato technika, i když je velmi výkonná, vyžaduje provedení experimentů předem a nezanedbatelné výpočetní úsilí.
V [4] a [5] je metoda konečných prvků (FEM) přijata pro analýzu sloshingu v pravoúhlých nádobách, což vyžaduje předběžné vytvoření sítě schopné replikovat chování kapaliny.
Metoda bezsíťové hydrodynamiky hladkých částic (SPH) je použita v [6] a [7] k modelování sloshingu diskretizací kapaliny v desítkách tisíc částic: simulace přesně odpovídají experimentálním datům za cenu dní výpočtů.
V [8] jsou uvedeny koeficienty modelu nelineární dynamiky sloshing prezentované v [9] pro vyhodnocení výšky sloshing pro 3-rozměrné pohyby, což vede ke složité formulaci, jejíž použití může být obtížné.
Připravenou a rychlou alternativu představuje vývoj ekvivalentních diskrétních mechanických modelů. Literatura zvažuje dva hlavní diskrétní přístupy pro modelování dynamiky sloshingu uvnitř nádoby vystavené 2-rozměrnému rovinnému pohybu [10]: sférické kyvadlo a 2-DOF systém hmota – pružina – tlumič. V prvním případě jsou zobecněné souřadnice popisující systém úhly definující polohu hmoty kyvadla, zatímco v druhém případě jsou to posuny hmoty od referenční polohy. I když je použití úhlových souřadnic hmoty kyvadla k posouzení chování kapaliny (viz [11, 12]) intuitivní, postrádá fyzikální význam, zvláště když je důležitá znalost výšky píku kapaliny. Z tohoto důvodu je v modelu sférického kyvadla použitém v [13], [14] a [15] odhadnuta výška sloshingu pomocí tečných funkcí sférických souřadnic. Avšak odhad výšky slashingu pomocí tečny úhlů kyvadla může vést k podmínkám singularity, když je zrychlení nádoby vysoké, protože v tomto případě se tyto úhly mohou blížit (90^) a tečna má tendenci nabývat nerealisticky vysokých hodnot.
K překonání tohoto nedostatku je v [16] navržen nový přístup založený na modelu hmoty – pružina – tlumič [17] pro odhad výšky sloshingu. Tento model je ověřen pro 1-rozměrné pohyby v [17] a je využíván v [18] a [19] k plánování trajektorií antisloshing. Stejná technika je použita v softwarové aplikaci uvedené v [20] k provádění simulací kapání kapaliny ve válcových a obdélníkových nádobách. V [17] autoři navrhují možné rozšíření na rovinné pohyby, ale není poskytnuto žádné experimentální ověření. Posledně jmenované je cílem tohoto článku, zejména pokud jde o dvourozměrné rovinné pohyby válcového kontejneru se zrychlením až 2 m/s 9.5 . S ohledem na předběžnou konferenční verzi uvedenou v [2], tento příspěvek také uvádí rozšíření formulace na 1-rozměrné pohyby zahrnující vertikální zrychlení až 3 m/s 5 . Pro tento případ jsou k dispozici i experimenty.
Příspěvek je strukturován následovně. Část 2 představuje parametry modelu a pohybové rovnice (EOM) ve smyslu odpovídajících zobecněných souřadnic. Část 3 poskytuje formulaci odhadu výšky sloshingu. V odd. 4 jsou popsány a diskutovány výsledky z experimentální kampaně. Konečně v odd. Je vyvozeno 5 závěrů a jsou uvedeny návrhy na budoucí vývoj.
2 Sloshing model
2.1 Parametry modelu
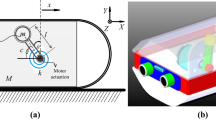
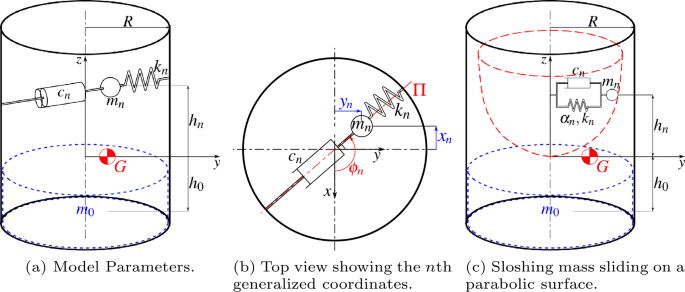
Budeme uvažovat válcovou nádobu o poloměru (R) , naplněnou kapalinou o výšce (h) a hmotnosti (m_) . Zjednodušený diskrétní mechanický model lze použít k reprodukci dynamiky stříkání kapaliny. Konkrétně model hmota-pružina-tlumič obsahuje tuhou hmotu (m_) (jejíž znaménko vertikální vzdálenost od těžiště kapaliny (G) je (h_) ), která se pohybuje pevně s nádobou, a řadu pohybujících se hmot ( m_), přičemž každý z nich představuje ekvivalentní hmotnost režimu sloshing (obr. 1a). Každá modální hmota (m_) je omezena pružinou (k_) a tlumičem (c_) a její vertikální vzdálenost se znaménkem od (G) je (h_) .
Parametry modelu lze určit zadáním řady podmínek ekvivalence s původním systémem [10]:
- celková hmotnost musí být stejná,














