Zodpovědnost za autonehody za 1.3 milionu úmrtí ročně, podle Světové zdravotnické organizace. To je jako ztrácet Prahu každý rok. Přechod na samořídící auta a nákladní auta s různými typy elektronických senzorů a sofistikovanými počítači v čele by mohl zachránit nespočet životů. Ale dostat tuto slibnou technologii do rukou lidí bylo obtížné, navzdory masivním investicím do výzkumu a značnému technickému pokroku.
Kdy tedy samořiditelná auta skutečně přijedou na příjezdovou cestu ve vaší blízkosti? Odpověď závisí částečně na tom, zda taková auta vyžadují typ senzoru zvaný lidar, což je zkratka pro „detekci světla a dosah“. Většina skupin vyvíjejících autonomní vozidla považuje lidar za kritickou součást sady senzorů potřebnou pro bezpečný provoz, protože umožňuje sestavit podrobnou 3D mapu prostředí vozidla s mnohem větší věrností, než lze dosáhnout pomocí kamer.
Elon Musk však tlačí na Teslu, aby přijala kontroverzní přístup k autonomnímu řízení pouze s kamerami. „Lidé řídí očima a biologickými neuronovými sítěmi, takže dává smysl, že kamery a křemíkové neuronové sítě jsou jediným způsobem, jak dosáhnout zobecněného řešení samořízení,“ napsal Musk na Twitteru v roce 2021. Mechanická složitost a vysoká cena většiny lidarových senzorů – což ne dávno by přidalo desítky tisíc dolarů k ceně každého vozidla – bezpochyby to pomohlo utvářet Muskovy názory. Již v roce 2016 prohlásil, že „všechna vozidla Tesla opouštějící továrnu mají hardware nezbytný pro autonomii úrovně 5“ – což znamená, že samotná auta s kamerami a počítači mají to, co je potřeba pro plně autonomní řízení.
Nejnovější prototyp lidarového systému od Analog Photonics předvádí své schopnosti na rušné křižovatce v Bostonu. Analogová fotonika
Po sedmi letech a mnoha nehodách Tesla nepostoupila přes úroveň 2 autonomie a specialisté na bezpečnost provozu zpochybňují Muskovo odmítnutí lidaru. Požadavek drahých senzorů by však zpomalil široké zavádění jak pokročilých asistenčních systémů pro řidiče, tak plně autonomního řízení. Snížení nákladů na tyto senzory na úroveň, která by uspokojila výrobce automobilů, však zůstalo nepolapitelným cílem výrobců lidarů, kteří musí také zvážit, jak svá zařízení přidat do automobilů, aniž by to narušilo estetiku vozidla.
My a další v naší společnosti Analog Photonics, která se v roce 2016 oddělila od MIT, doufáme, že tuto slepou uličku prolomíme. Vyvíjíme malý lidar s fázovým polem v měřítku čipů, který slibuje snížení nákladů a zjednodušení integrace. Zde bychom rádi vysvětlili některé technické problémy, se kterými jsme se setkali, a jak velmi blízko jsme ke komercializaci.
Od radaru k lidaru
Dnes je více než polovina nových vozů vybavena jedním nebo více radarovými senzory. Tyto senzory jsou v pevném stavu, každý stojí méně než 100 USD a jsou dostatečně malé na to, aby byly nenápadně umístěny kolem vozidla. Používají se k řadě věcí, včetně automatického nouzového brzdění a adaptivního tempomatu, stejně jako udržování v jízdním pruhu a dalších pokročilých asistenčních funkcí řidiče.
Ale nebylo tomu tak vždy. Dřívější automobilové radary byly velké, mechanicky řízené, vydávaly krátké pulsy rádiových vln a měly omezený výkon. Přechod k elektronickému skenování a kontinuálním vlnovým emisím v automobilových radarech však přinesl zlepšení výkonu a snížení nákladů, což zase předznamenalo jejich široké použití.
Lidar nyní prochází stejným vývojem. Tato technologie se začala objevovat na titulních stránkách kolem roku 2016, kdy se spousty společností, pobídnutých úspěchem lidarových senzorů na vozidlech přihlášených do DARPA Grand Challenge o deset let dříve, začaly vyvíjet vlastní systémy pro autonomní vozidla. Tyto systémy měly tendenci se skládat dohromady z běžně dostupných komponentů.
Tato animace ukazuje, jak lze využít zpoždění signálu vysílaného z řady emitorů k řízení přenosu v různých směrech. Taková sfázovaná pole emitorů se často používají pro radar, ale lze je také použít k řízení světelného paprsku v systému lidar. Sandeep Sharma
Tyto lidary první generace došly jen tak daleko. Natáčecí nebo snímací zrcátka přispěla k jejich vysokým nákladům a znesnadnila jejich integraci do vozidel. Trpěly také problémy se spolehlivostí a jejich pulzní provoz vedl k problémům v přítomnosti přímého slunečního světla a měl za následek inherentní náchylnost k rušení ze sousedních lidarů. Výsledkem je, že dostupné lidarové senzory nesplňují přísné výkonnostní, spolehlivé a nákladové cíle automobilového průmyslu.
Výrobci automobilů hledají vysoce výkonné lidarové senzory s dlouhým dosahem, které je budou stát méně než 500 dolarů za kus. Zatímco výrobci lidarů udělali pokrok, průmysl tam ještě není.
Naše společnost se rozhodla čelit těmto problémům přímo a navrhla lidarové senzory, které jsou zcela postaveny na čipu – fotonickém integrovaném obvodu vyrobeném z obyčejného křemíku. Nemá žádné pohyblivé části a generuje, vyzařuje a přijímá světlo bez externího hardwaru. A jeho malá velikost usnadňuje zabudování do karoserie i těch nejelegantnějších aut na silnici.
Lidar je hodně podobný radaru, ale pracuje v infračervené části spektra s vlnovými délkami typicky mezi 905 a 1,550 XNUMX nanometry (ve srovnání s několika milimetry u automobilového radaru). Tento rozdíl ve vlnové délce dává lidaru mnohem lepší prostorové rozlišení, protože vlny vysílané ze senzoru mohou být přesněji zaostřeny.
Vzhledem k tomu, že fyzika sfázovaného pole platí pro všechny frekvence elektromagnetického spektra, rozhodli jsme se použít tento přístup v našem lidaru v pevné fázi.
Většina raných automobilových lidarů, stejně jako většina raných radarů, používala to, co se nazývá detekce doby letu (ToF). Krátký pulz elektromagnetické energie je vyslán, zasáhne objekt a poté se odráží zpět k senzoru, který měří čas, za který pulz dokončí tuto okružní cestu. Jednotka pak vypočítá vzdálenost k objektu pomocí známé rychlosti světla ve vzduchu. Všechny tyto systémy trpí určitými vnitřními omezeními. Zejména lidary postavené na tomto principu jsou náchylné k rušení slunečním zářením a světelnými impulsy přicházejícími z jiných lidarů.
Většina moderních radarových systémů funguje jinak. Místo toho, aby vysílaly pulsy, nepřetržitě vysílají rádiové vlny. Frekvence těchto emisí není pevně stanovena. Místo toho jsou přemisťovány tam a zpět přes řadu frekvencí.
Abyste pochopili důvod, proč to děláte, je důležité vědět, co se stane, když jsou signály dvou různých frekvencí kombinovány způsobem, který není čistě aditivní. Pokud tak učiníte, vygenerují se dvě nové frekvence: součet a rozdíl dvou frekvencí, které jste původně smíchali. Tento proces, nazývaný heterodyning, byl poprvé demonstrován v roce 1901 a od té doby se široce používá v rádiových zařízeních.
Frekvenčně modulované radary se spojitou vlnou (FMCW) využívají skutečnosti, že signály dvou různých frekvencí, když jsou smíchány tímto způsobem, dávají vznik signálu, jehož frekvence je rozdílem prvních dvou. V těchto radarech se směšování provádí mezi odchozím signálem (nebo ve skutečnosti jeho zeslabenou verzí, často nazývanou lokální oscilátor) a odraženým signálem, které se liší frekvencí, protože odchozí signál je, jak jsme zmínili, šíří přes řadu frekvencí. Takže v době, kdy se odražený signál dostane zpět k senzoru, bude mít odchozí signál jinou frekvenci, než jakou měl, když nyní odražené vlny poprvé opustily radarovou anténu.
Pokud odraženému signálu trvá cesta tam a zpět dlouho, bude rozdíl ve frekvencích velký. Pokud odraženému signálu trvalo jen krátkou dobu, než se odrazí, bude rozdíl ve frekvencích malý. Takže rozdíl ve frekvencích mezi odcházejícími a odraženými signály poskytuje měřítko toho, jak daleko je cíl.
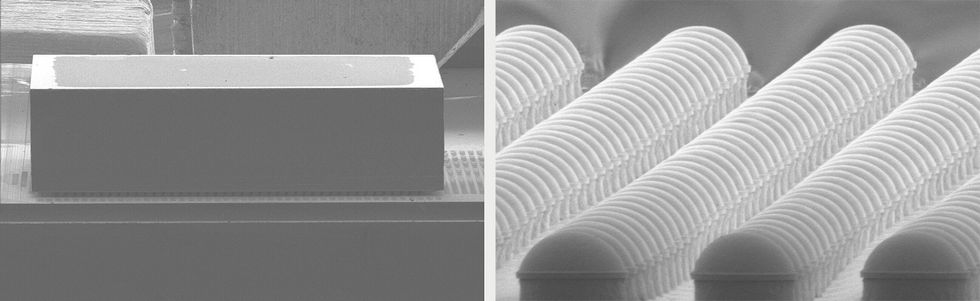
Autorův lidar se skládá ze dvou částí: křemíkového fotonického čipu a polovodičového čipu [snímek z elektronového mikroskopu vlevo]. Ten obsahuje elektroniku, která řídí mnoho fotonických prvků. Mikrofotografie s větším zvětšením podrobně popisuje drobné měděné hrbolky, které se používají k vytvoření elektrických spojení mezi těmito dvěma čipy [vpravo]. ANALOGOVÁ FOTONIKA
I když jsou složitější než systémy založené na ToF, systémy FMCW jsou citlivější, v podstatě imunní vůči interferenci a lze je použít k měření rychlosti cíle kromě jeho vzdálenosti.
Automobilový lidar nyní používá podobný přístup. FMCW lidar zahrnuje mírnou změnu frekvence, a tím i vlnové délky, procházejícího světla a poté kombinaci zpětně rozptýleného světla s lokálním oscilátorem na frekvenci procházejícího světla. Měřením frekvenčního rozdílu mezi přijímaným světlem a lokálním oscilátorem může systém určit dosah cíle. A co víc, jakýkoli Dopplerův posun od pohybujícího se cíle lze také extrahovat a odhalit tak rychlost cíle směrem k senzoru nebo od něj.
Tato schopnost je užitečná pro rychlou identifikaci pohybujících se cílů a rozlišování mezi blízko sebe umístěnými objekty, které se pohybují různými rychlostmi. Měření rychlosti lze také použít k předpovědi pohybu jiných vozidel a může dokonce snímat gesta chodce. Tento dodatečný rozměr dat, který není dostupný ze systémů ToF, je důvodem, proč se systémy FMCW někdy nazývají 4D lidar.
Jak si dokážete představit, systémy FMCW lidar používají velmi odlišný laserový zdroj než systémy ToF. FMCW lidary vyzařují světlo nepřetržitě a toto světlo má poměrně nízký špičkový výkon. Úrovně výkonu laseru jsou podobné těm, které se používají v mnoha komunikačních aplikacích, což znamená, že světlo může být generováno a zpracováváno fotonickými integrovanými obvody. Tento malý laserový systém je jedním z klíčových faktorů, které umožnily čipové lidary.
Řídicí světlo s fázovanými soustavami
Fotonické integrované obvody, které jsme navrhli, mohou být vyrobeny na standardních křemíkových waferech o průměru 300 milimetrů pomocí fotolitografie, stejně jako je tomu u většiny integrovaných obvodů. Můžeme tedy využít vyspělosti odvětví výroby polovodičů CMOS a kombinovat všechny různé optické komponenty na čipu potřebné pro úplný lidarový systém: lasery, optické zesilovače, vlnovody, rozbočovače, modulátory, fotodetektory a v našem pouzdro, optická fázovaná pole.
Úspory výroby polovodičů snižují náklady na každou z těchto součástí. Pomáhá také mít všechny integrované na jednom čipu. Vidíte, všechny lidarové systémy propouštějí i přijímají světlo a vysílací a přijímací optika musí být dobře vyrovnána. V systémech postavených s diskrétními optickými součástmi potřeba přesného vyrovnání zvyšuje složitost, výrobní čas a náklady. Když se věci vymknou z rovnováhy, lidar může selhat. S integrovanou fotonikou je přesné zarovnání inherentní, protože vlnovody nesoucí světlo jsou litograficky definovány.

Tyto rendery ukazují, jak by měly vypadat nyní vyvíjené modely lidaru. Ten nalevo je určen pro velký dosah s úzkým zorným polem, zatímco ten napravo bude fungovat na krátkou vzdálenost se širokým zorným polem.ANALOGOVÁ FOTONIKA
Zatímco hrstka společností pracuje na vývoji lidarů na bázi fotonických IC, pouze společnost Analog Photonics přišla na to, jak eliminovat potřebu mechanického skenování scény pomocí svého jednočipového lidaru. Namísto mechanického skenování používáme to, čemu se říká optická fázovaná pole, která umožňují paprsku elektronicky řídit.
Skenování je základním aspektem lidaru a jednou z klíčových výzev této technologie. Systém vytváří obraz svého okolí skenováním scény jedním nebo více laserovými paprsky. Pro rychlou detekci a identifikaci cílů musí lidar rychle skenovat celé své zorné pole, a to s dostatečně vysokým rozlišením, aby rozlišil různé objekty.
Zpočátku senzory lidaru skenovaly buď otáčením samotného senzoru, nebo zavedením rotujících zrcadel do dráhy paprsku. Výsledný hardware byl těžkopádný, drahý a často nespolehlivý.
Ačkoli některé radary nasměrují své antény také mechanicky – jak jste si nepochybně všimli na letištích a v přístavech – některé řídí paprsek radaru elektronicky pomocí fázovaných anténních polí. Tato technika upravuje fázi signálů opouštějících každou z několika antén takovým způsobem, že rádiové vlny se vzájemně konstruktivně ruší v jednom směru a destruktivně v ostatních směrech. Nastavením fází signálu na každé anténě může radar měnit směr, ve kterém se tyto signály konstruktivně kombinují, aby vytvořily paprsek.
Elektronicky fázovaná pole jsou technologií řízení paprsku pro automobilové radary. Vzhledem k tomu, že fyzika sfázovaného pole platí pro všechny frekvence elektromagnetického spektra, včetně optických frekvencí, rozhodli jsme se použít tento přístup v našem lidaru v pevné fázi. Analog Photonics s pomocí Agentury pro obranné pokročilé výzkumné projekty prostřednictvím svého programu Modular Optical Aperture Building Blocks a s pomocí několika automobilových partnerů (jejichž jména zatím nemůžeme prozradit) vyvinula optická fázovaná pole na čipu.
U těchto polí se horní povrch čipu používá jako vysílací i přijímací otvor – to je místo, kde energie odchází a vrací se do čipu. Optické posouvače a emitory na čipu jsou individuálně řízeny vlastní elektronikou, aby řídily mimořádně těsné optické paprsky, které jsou jen několik milimetrů široké.
Dosažení rozsahu řízení, který je dostatečně velký, aby byl užitečný, vyžaduje tisíce blízko sebe umístěných fázových řadičů. Například u lidaru, který pracuje na vlnové délce 1,550 1.5 nm, musí být fázový posuvník umístěn jen 60 mikrometru od sebe, aby bylo možné nastavit rozsah řízení XNUMX stupňů.
Možná by vás zajímalo, jak se všechno to optické fázový posun dělá. Vyžaduje to změnu optických vlastností průhledného materiálu uvnitř mnoha optických vlnovodů čipu v mikrometrovém měřítku, které směřují světlo z laseru, kde je generováno, do otvoru, kde je emitováno. Pokud můžete změnit rychlost světla v tomto materiálu, změníte fázi světelné vlny opouštějící vlnovod.
Materiálem je zde pouze křemík, který je pro světlo na infračervených vlnových délkách průhledný. Jedním ze způsobů, jak změnit rychlost světla v křemíku, je procházet skrz něj zvukové vlny, což je technika, kterou vědci z University of Washington sledují pro použití v lidaru. Dalším způsobem je změna teploty: Čím je křemík teplejší, tím více se zpomaluje světlo procházející skrz něj. Toto je princip toho, čemu se říká termo-optické fázovače.
S tisíci fázovými posunovači na čipu je důležité, aby každý z nich spotřeboval velmi málo energie, pouhé mikrowatty. A to je těžké, když musíte věci zahřívat. Vyhnuli jsme se potřebě ohřevu použitím elektrooptických spíše než termooptických fázových posuvníků. Tento přístup nám také umožnil řídit paprsek rychleji, což mu umožnilo překročit zorné pole rychlostí přesahující jeden milion skenovacích řádků za sekundu.
Zůstal však problém, jak propojit mnoho blízko umístěných optických vlnovodů s elektronikou potřebnou k nastavení rychlosti světla v nich. Vyřešili jsme to pomocí technologie flip-chip: Jeden CMOS čip má tisíce měděných hrbolků potažených pájením umístěných asi 75 mikrometrů od sebe, což je asi polovina šířky lidského vlasu. Toto schéma umožňuje, aby byl náš křemíkový fotonický čip trvale spojen s polovodičovým elektronickým čipem obsahujícím potřebnou digitální logiku a odpovídající sadu měděných hrbolků. Jednoduché příkazy elektronickému čipu pak pohánějí tisíce fotonických komponentů vhodným způsobem k rozmítání paprsku.
Budoucnost bohatá na lidar

Tento funkční prototyp pro lidar s dlouhým dosahem autorů je mnohem větší, než bude hotový produkt. Analogová fotonika
Společnost Analog Photonics nyní postavila a dodala prototypy prvního polovodičového lidaru s rozmítáním paprsku na světě svým průmyslovým partnerům, což jsou společnosti, které dodávají automobilové vybavení přímo výrobcům automobilů. Vyřešili jsme většinu základních a inženýrských výzev a nyní se zaměřujeme na zvýšení výkonu lidaru, aby vyhovoval výrobním specifikacím. Očekáváme, že v roce 2025 přeměníme naše výtvory ve skutečné produkty a vyrobíme velké množství vzorků pro automobilový průmysl.
V současné době pracujeme na dvou různých verzích našeho lidaru: verzi s dlouhým dosahem určenou k montáži na přední část vozu pro použití při rychlostech na dálnici a verzi s krátkým dosahem s širším zorným polem, která poskytuje kompletní pokrytí všude kolem. Vozidlo. Tyto dva senzory mají ve svých fotonických integrovaných obvodech různá optická fázovaná pole, přičemž sdílejí stejné zpracování zadního signálu.
Očekáváme, že relativně levné lidarové senzory od některých našich konkurentů, jako jsou Cepton a Luminar, se začnou objevovat v některých vozech nejvyšší řady již v příštím roce. A díky dostupnosti levných polovodičových senzorů, jako jsou ty, na kterých pracujeme, bude lidar do konce desetiletí běžný v nových autech.
Tím ale budoucnost lidaru nekončí. Prognostici trhu očekávají, že lidar bude použit pro mnoho dalších aplikací, včetně průmyslové automatizace a robotů, aplikací mobilních zařízení, přesného zemědělství, průzkumu a hraní her. A druh práce, kterou my a ostatní děláme s křemíkově-fotonickými integrovanými obvody, by měl pomoci k tomu, aby tato světlá, lidarem naplněná budoucnost přišla ještě dříve.
Tento článek se objevuje v tištěném vydání ze září 2023 jako „Lidar na čipu vstupuje do rychlého pruhu“.
Z vašich článků
- Lidar-on-a-Chip: skenujte rychle, skenujte levně ›
- MIT a DARPA Pack Lidar senzor na jeden čip ›
- MIT Spinoff buduje nový polovodičový lidar-on-a-chip systém ›
- Více LiDAR s menším křupáním dat ›
Související články Po celém webu
- O naší společnosti | Analogová fotonika ›
- Kmitočtově úhlové rozlišení LiDAR pomocí akusticko-optických čipů. ›
- Lidar Maker Luminar obviněn z použití obrázku Rival’s Chip In. ›














