
Nezapomeňte se podívat na video o důležitosti Over Steer a Under Steer….
Pravděpodobně jste jezdili nebo viděli motokáru a přemýšleli jste, jak všechny tyto vazby způsobují, že se motokára otáčí. Systém může zpočátku vypadat jako talíř špaget, ale jakmile pochopíte, systém je docela jednoduchý a důmyslný.
Za prvé, účelem systému řízení je samozřejmě otočit motokáru. Ale ne tak zřejmá část je otáčení motokáry, aniž by to způsobilo zvedání a pískání pneumatik. Geometrický vztah mezi akční linií motokáry a poloměrem zatáčky je důležitý pro hladké zatáčení a rovnoměrné opotřebení pneumatik.
Řídicí systémy lze rozdělit do dvou různých provedení:
Systém řízení Ackermann
Systém řízení podvozku
Začneme systémem Bogie, protože je nejúčinnější a designově nejjednodušší.
Systém podvozku je systém, kde jsou dvě přední kola namontována na nosníku nebo stejné ose a otočná ve střední části. Říkám tomu systém řízení ve stylu vozu, protože je velmi podobný systému, který se nachází na jednoduchém tahu za vozy. Rukojeť, například na tahu za vagónem, řídí systém předních kol a mění směr vozu.
Tento systém je nejúčinnější, protože kola se při otáčení vozidla stejnoměrně drhnou a sledují střed zatáčky nebo kruh otáčení ve správném geometrickém vztahu.
Možná jste se v tom posledním prohlášení ztratili, nebojte se, budeme o tom přemýšlet později. Jen je důležité vědět, že řízení ve stylu kombi má své místo.
Nevýhodou typického řízení ve stylu vozu je, že množství pohybu potřebného k otočení motokáry může být poměrně velké. Typické je vychýlení například o více než 60 stupňů, což může u typické motokáry představovat pohyb kolem 18 palců z krajních poloh (úplná zatáčka zleva až úplně doprava). Dosažení rychlého pohybu podvozkového systému může být obtížné dosáhnout bez nadměrného zatížení (nebo požadované síly paží, což může být problém pro mladší řidiče) a nebo nadměrného pohybu volantu (vícenásobné otočení kola, které většinou jezdí motokáry nevyžadují.)
Dalším konstrukčním aspektem podvozkového systému je, že musí být podepřen. Přední kola musí poskytovat svislou oporu během zatáčky nebo jinak, když se motokára může převrátit. Aby se toho dosáhlo, přední řízení je podepřeno rámem nad ním, aby se zabránilo zvednutí řízení během zatáček.
Systém řízení Ackermann nebo systém čepů řízení je systém, kde jsou nápravy namontovány na čepech mimo motokáru. Kola se otáčejí svisle kolem těchto čepů a způsobují otáčení kol.
V pohybu kol existuje vztah k natočenému středu. Na čepech řízení je také polohovací systém, který je důležitý pro řízení. Polohovací systém je důležitější při použití u těžších vozidel. U lehčích vozidel, jako jsou motokáry, není umístění tak důležité.
Pokud se vážně chystáte vyrobit motokáru, vřele bych vám doporučil přejít na systém čepů řízení.
Bylo řečeno; pojďme diskutovat podrobněji o systému čepu řízení.
Je několik věcí, které musíme identifikovat: existuje střed otáčení a středy poloměru otáčení vozidla.
Nejtěžší část, kterou si zde lze představit, je, že vnitřní kolo se snaží otáčet pomaleji než vnější kolo. A to podle definice znamená, že poloměr otáčení vnitřního kola bude menší než poloměr otáčení vnějšího kola.
Nejlépe to vysvětlím na příkladu kolotoče. Pokud nasednete na kolotoč, když se točí a měli byste jít do středové oblasti, všimli byste si, že se ve středu netočí tak rychle. Budete cítit méně tažné energie. Ale když půjdete na vnější stranu, budete mít pocit, že vás vytrhnou ven. Důvodem je, že cítíte větší rychlost nebo energii. Vnější strana kolotoče jde rychleji než střed. I když se vše točí stejně, rychlost v radiálním bodě, ve kterém se nacházíte, se zvyšuje s rostoucím poloměrem. Rychlost na vnější straně kolotoče je vyšší a způsobí, že na tváři pocítíte větší sílu a rychlost větru.
A to je totéž, co se děje s motokárou, když se točí, vnější kola se budou točit rychleji než vnitřní kola. (Jen jako okrajová poznámka: diferenciál na autě je navržen tak, aby vyhovoval různým rychlostem vnějšího kola a vnitřního kola. Takže vnější kolo se otáčí rychleji než vnitřní kolo.)
Na motokárách však kvůli malému poloměru otáčení vnitřní pneumatika cvrliká nebo ztrácí trakci, protože se snaží jet stejně rychle jako vnější pneumatika. Jinými slovy, vnitřní pneumatika se bude v zatáčce pohybovat stejnou rychlostí jako vnější kolo. To způsobí protáčení pneumatiky nebo uvolnění gumy při otáčení motokáry. Odtud pochází opotřebení. Přichází především z rohů. Protože vnější kolo se točí rychleji, než by chtělo jet vnitřní kolo.
S ohledem na to se mechanismus řízení na motokárách musí přizpůsobit rozdílům v rychlostech pneumatik, aby se maximalizovala účinnost v zatáčkách.
Turning Point
Aby se pneumatika dobře nebo snadno otáčela, musí se pneumatika otáčet kolem bodu otáčení. Záměrem návrhu je otočit se kolem středu pneumatiky.
Když se nad tím zamyslíte, je méně drhnutí. Je mnohem snazší vyvíjet síly nebo pohybovat pneumatikou ve vertikálním axiálním pohybu. Pokud byste provedli nějaké zkoumání kol na autech a jejich nastavení, uvidíte, že se pneumatiky budou točit kolem svých středů. A přitom je to snazší pro pneumatiky, je to jednodušší pro systém odpružení, je to jednodušší pro hnací linii a je snazší pohybovat volantem.
Nákladní vozy s pohonem čtyř kol mají ve svých konstrukcích potíže s tím, aby přední kola měla bod otáčení ve svých středech. Design se setkává s určitou mentální gymnastikou, aby se dostal do ideální polohy. Pokud se podíváte například na nákladní auta, mají tento problém. Nákladní vozy s pohonem všech čtyř kol udělají náboj mnohem dál, protože se snaží dosáhnout toho, aby střed zatáčky byl přímo ve středu pneumatiky.
V Ackermanově řízení je další prvek, kterým je sklon otáčení nebo rejd. Konstrukce sklonu zatáčecího systému má co do činění se silami, kterým vozidlo při zatáčení čelí. Pokud se systém nakloní dozadu k zádi vozidla, bude řízení výhodnější, agresivnější. Rovněž se sníží síly vyvíjené vozidlem. Vozidlo má menší vliv na volant a na volantu je více velitelský pocit než na cestujícího. To je hlavní účel odlévání systému řízení.
Obecně je nesprávné navrhovat vozidlo tak, aby se kola nenatáčela ideálně na střed zatáčky. Výsledkem je, že pneumatiky budou vyvíjet vyšší tlakové a drhnoucí síly, které budou cítit ve volantu.
Jako řidič budete více bojovat za volant, abyste řídili motokáru.
V důsledku toho to budete muset mít na paměti, pokud navrhujete motokáru s opravdu velkými pneumatikami. Velké pneumatiky budou těžké. Pokud není systém řízení vozidla navržen správně, řidič bude tvrdě bojovat, aby provedl pohyby řízení. Nebude to příjemná jízda.
Způsoby, jak obejít špatný systém řízení, by bylo mít hřebenové řízení, které pomáhá získat mechanickou výhodu. Jinými slovy, činí řízení méně obtížným tím, že snižuje odpor při zatáčení.
Způsob, jak obejít složitý systém hřebenového řízení, je správně navrhnout systém řízení s bodem řízení na správném místě, optimalizovaným ackermannovým vztahem, nastavením koleček pro maximální účinek a odklonu pro maximální sílu otáčení. K dosažení těchto cílů to vyžaduje určitou vynalézavost a designové uspořádání.
Aby si to udrželi v perspektivě, věnují inženýři svůj život navrhování systémů odpružení pro automobily. To je vše, co dělají.
Očekávat od sebe, že něco navrhnete hned od začátku, je hodně očekávatelné. Jedním ze způsobů, jak to obejít, je koupit něčí plány, kde provedli všechny ty výpočty a už to udělali. Nebo můžete použít hrubé pokyny, o kterých jsem mluvil. Můžete udělat nějaké hrubé rozvržení a pokusit se trochu přijít na to. V Go Kart Building Series jsou další podrobnosti o tom, jak navrhovat systémy řízení. Je to skvělý zdroj, zejména pro ty, kteří to chtějí dělat správně.
Návrh systému řízení
Systém řízení Ackerman se skládá z pák, které jsou umístěny na každém z čepů řízení. Délka páky určuje pohyb a potřebnou sílu: čím delší páka, tím lepší mechanická výhoda. Čím je však páka delší, tím je zapotřebí větší házení. A čím větší házení je zapotřebí, tím dražší je systém řízení.
Nízkonákladovým ideálním řešením pro motokáry jsou systémy stejné délky na pohonu řízení a na čepech řízení. Budou mít zhruba stejné radiální vzdálenosti. Systém je v podstatě paralelogramový systém. Což má za následek ekvivalentní množství pohybu volantu a kloubů kol při jejich otáčení.
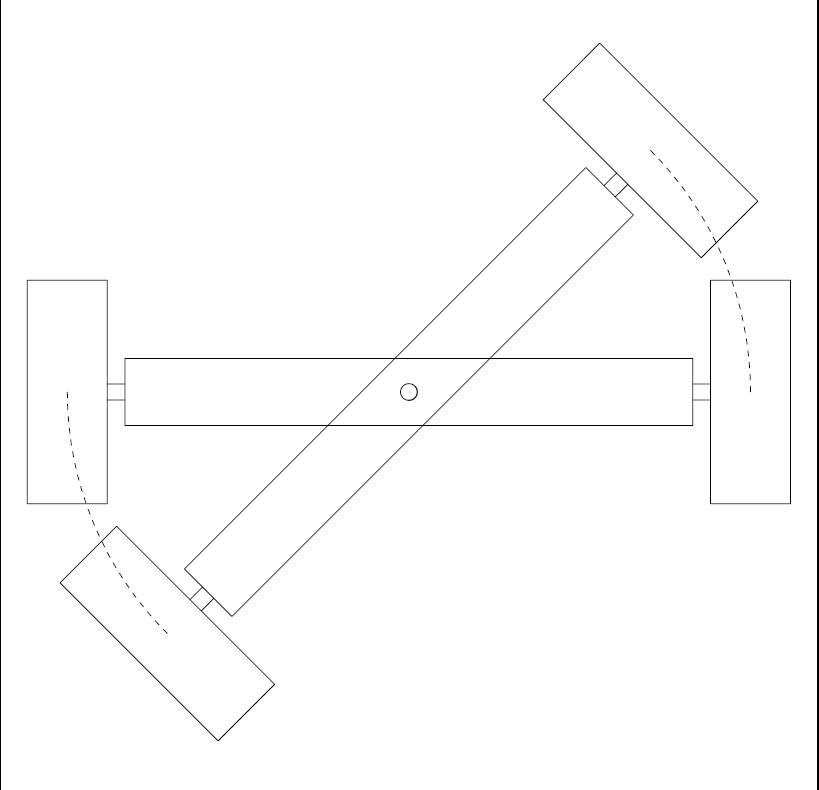
Například design Phi-Alpha-10 má vnitřní kola otáčející se více, zatímco vnější kola se otáčejí méně. Souvisí to s přesazením úchytů tyčí na pohonu řízení. Systém by byl klasifikován jako čtyřtyčový spoj. Rozvržení lze zhruba provést na kus papíru nebo na mechanickém konstrukčním programu. Vztahy radiálních zatáček pak mohou být také rozvrženy, aby pomohly optimalizovat a vizualizovat systém.
Možná jste viděli systémy, kde se konce spojovací tyče spojují ve stejném bodě. Spojení obou konců tyčí ve stejném bodě není ideální, ale ani na motokárách to nebude problém. Účelem systému čtyř tyčí je to, že poloměr řízení lze více optimalizovat pomocí systému čtyř tyčí. Souvisí to s šířkou motokáry. Geometrie systému se například bude mírně lišit pro motokáru s dvojitou šířkou než pro motokáru s jednou šířkou.
Z pohledu motokár (pokud nevyrábíte závodní motokáru) bude systém pravděpodobně fungovat dobře. Jediný případ, kdy systém vykazuje problémy, je při extrémních zatáčkách. Výsledkem bude drhnutí pneumatik, zejména hon od vnitřní pneumatiky k vnější, v závislosti na typu vozovky. Spojení konců spojovacích tyčí k sobě na jeden čep u pohonu řízení však není ideální a bude fungovat správně, jen ne optimálně. Ideální je čtyřtyčové spojení nebo mít pruty posunuté, jak je tomu u plánů Phi-Alpha-10 a Phi-Alpha-9. Konstrukce se čtyřmi tyčemi funguje lépe a byla ověřena. Mnoho návrhů závodních motokár používá tento offset pro návrh spojení tyče.
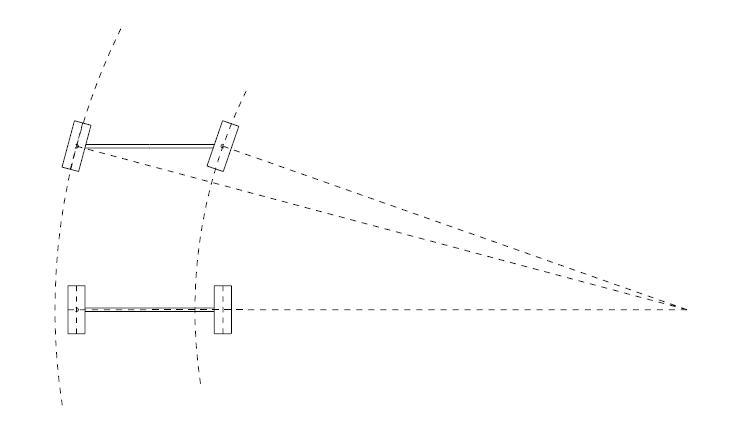
Obrázek: Vnější kolo má menší úhel (15 stupňů), zatímco vnitřní kolo má strmější úhel (19 stupňů). Všimněte si dvou různých radiálních drah otáčení pro každou pneumatiku. Vnější část má větší poloměr a vnitřní menší poloměr. Vnější pneumatika musí jet rychleji, aby udržela krok s vnitřní pneumatikou.
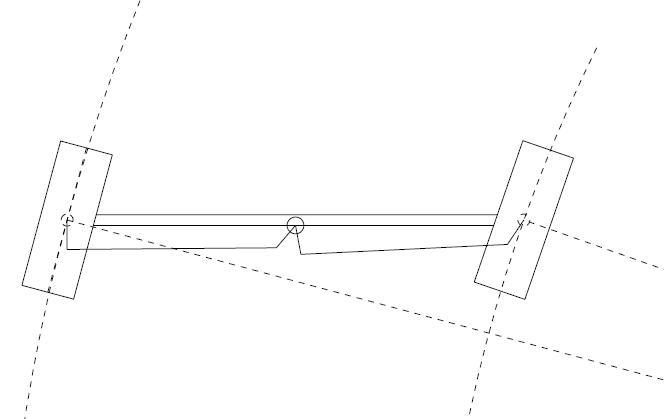
Nyní otázka zní: “Mám umístit spojovací tyče nad nebo pod systém řízení?” Raději půjdu níže. A důvodem je to, že se vaše nohy mohou dostat nad mechanismus řízení. Nebudou se všichni zamotávat do spojovacích tyčí. Existují plány a viděl jsem je tam, kde je mechanismus řízení nahoře. Bohužel se kalhoty a nohy řidiče zamotají do spojovacích tyčí. Výsledkem je, že design pro Phi-Alpha-10 a Phi-Alpha-9 má z hlediska balení spojovací tyče níže.
Závěsné systémy

Jedna věc, kterou je třeba mít na paměti, zejména u systému odpružení, je, že vztah konců spojovací tyče řízení se může změnit, když se odpružení pohybuje. Není-li systém správně navržen (jinými slovy, pokud středové čáry konců spojovací tyče řízení nejsou přímo ve středu, jako v systému rovnoběžníku), když dojde k nárazu a kolo se zvedne, kolo buď pohybovat dovnitř nebo ven (axiálně svisle). Vztah mezi koly a systémem řízení se změní, což způsobí, že se přední kola budou převracet dopředu a dozadu. To může být velmi nebezpečné, když je vozidlo v pohybu.
Při pohybu zavěšení musí být spojovací tyče v neutrální poloze. Výsledkem bude, že se kola při pohybu odpružení neotáčejí svisle. Tento konstrukční krok je velmi důležitý.
Když se podíváte na auto a prozkoumáte jeho systém zavěšení, uvidíte, že konce spojovací tyče a jejich vztah k zavěšení se nepohybuje. Udržují centrální polohu, která je velmi důležitá pro, samozřejmě sledování. Představte si, že byste měli naložit náklad, přední náklad s někým, kdo je těžší než vy, a najednou je sledování kol vypnuté, protože vztah konců spojovacích tyčí zavěšení není neutralizovaný nebo správný.
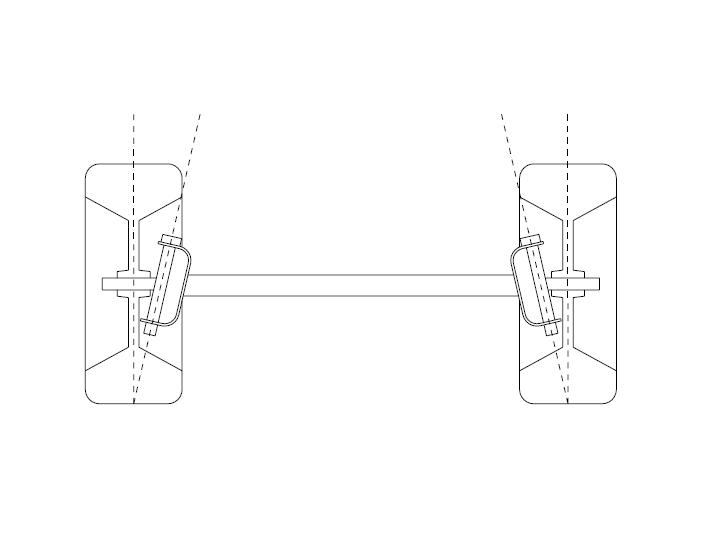
Systém čepu řízení je zdaleka nejspolehlivější, nejrobustnější a nejlépe ovladatelný systém, který používají vozítka a auta. Pokud jde o návrhy čepů řízení, existuje celá řada různých způsobů, jak čepy řízení držet na místě.
Jednoduchým systémem je použití trubky s velmi velkým šroubem přivařeným k trubce. Trubice je poté obklopena C-kanálem. Poté protáhněte šroub C-kanálem i trubkou. Na samotnou trubku přivařte radiální rameno. Na samotné paži by měl být klínek, aby udržoval kroutící pohyby, když dojde k nárazům. Na rameni je otvor pro montáž konce spojovací tyče. Spojovací tyč se připojuje k systému pohonu řízení. Tyče řízení se vysouvají směrem k spolujezdci. Obě strany systémů jsou propojeny se systémem pohonu středového řízení.
Konec spojovací tyče je pohyblivý kloub, který má v sobě kouli. Táhlo se může pohybovat a pohybovat o 360° ve dvou rovinách. Konec tyče může pohybovat tyčí tam a zpět. Je určen k přenášení zatížení ze systému pohonu řízení na čep řízení.
Díly řízení lze zakoupit jako jednotky v jakémkoliv prodejně motokár. https://gokartguru.com/partsupplies.php
Existují různé druhy konců spojovacích tyčí, které lze použít.
Je zde tyč se závitem, kde se konec tyče řízení navléká do konce spojovací tyče. Důležitým a často opomíjeným konstrukčním hlediskem je, že se konce spojovací tyče mohou uvolnit.
Protože motokára je vibrační stroj, musí být vše těsné, jinak se předčasně opotřebuje a nakonec selže.
Aby byl konec spojovací tyče pevně utažen, zajistěte konec spojovací tyče matice. Díky tomu je vše pěkně a pevně.
Je velmi důležité, aby všechny spoje byly relativně těsné a nebyly uvolněné, protože vibrace začnou způsobovat, že věci selžou, budou se ohýbat a válet se. Nakonec se systém řízení vypne a bude mít hodně vibrací. I když je namontován velmi velký motor a hodně vibruje, pokud je systém řízení pěkně utažený, konce spojovací tyče si udrží těsnost. I když se na sloupku řízení objeví vibrace, pevné konce spojovací tyče si zachovají svou polohu. Pokud jsou věci uvolněné, čepy řízení se zvednou. Pneumatika se také rychleji opotřebuje.
Nyní pár slov k seřízení systému řízení. Všiml jsem si, že některá místa na motokárách naznačují, že přední kola by se měla naklonit dopředu o 1°. Nebo 1° záporný tah.
Důvodem je to, že když motokára jede vpřed, skluz se zabere a všechna kola budou rovnoběžná. Je tedy dobré dát alespoň 1° dopředu. Když začnete řídit, samo se vyvalí. Souvisí to také s množstvím záběru, který dostáváte při řízení.
















